המדריך השלם לכונני מנוע ועוד
הגדרה וחשיבותם של נהגי מנוע
מפתח חאקוטרסטים של נהגים מוטוריים
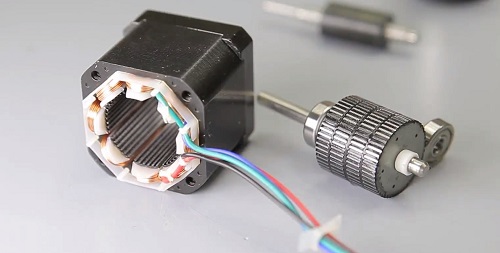
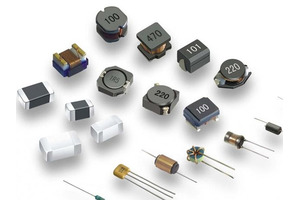
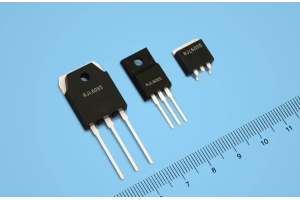
רכיבים עיקריים של כונני מנוע
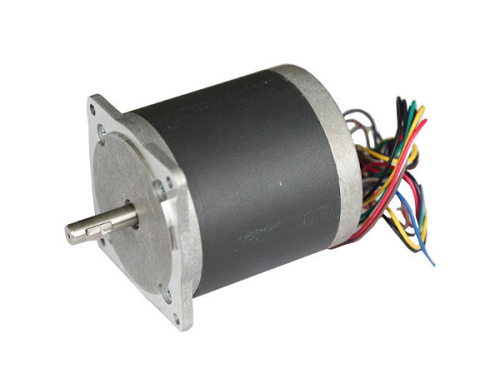
סוגים נפוצים של כוננים מוטוריים
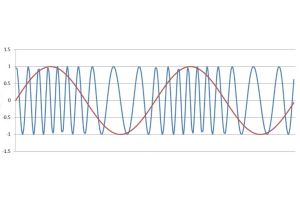
עיקרון עבודה של נהגי מנוע
ההכרח של נהגי מנוע
חשיבותם של כונני מנוע ביישומים
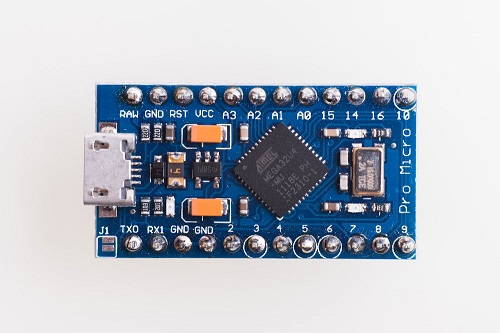
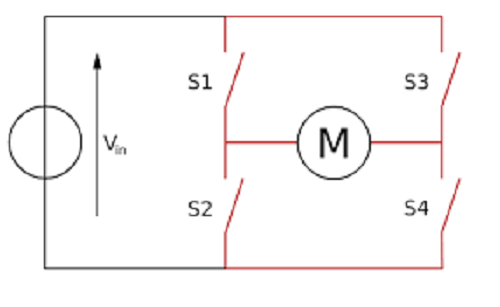
יישום מעגל H-Bridge
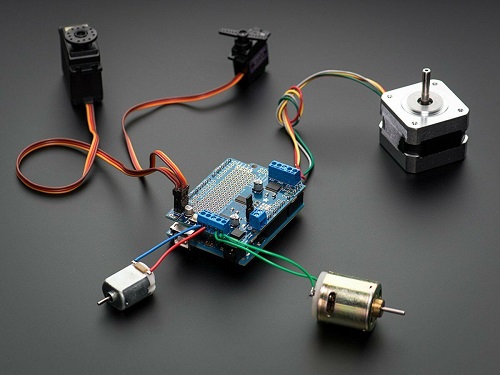
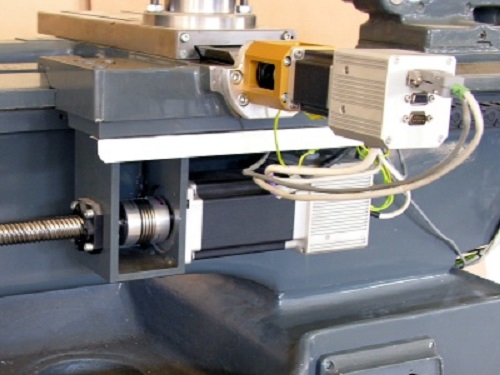
שלבים לבניית מעגל כונן מנוע
סיכום
דאסיפה וחשיבות של נהג מנוע
מאפייני מפתח של נהגי מנוע
רכיבים עיקריים של כונן מנוע
סוגים נפוצים של כוננים מוטוריים
עיקרון העבודה של נהג המנוע
ההכרח של נהג מנוע
חשיבותם של כונני מנוע ביישומים
יישום מעגל H-Bridge
שלבים לבניית מעגל כונן מנוע
סיכום
עלינו
ALLELCO LIMITED
קרא עוד
חקירה מהירה
אנא שלח בירור, נגיב מייד.

CR1632 תכונות מדריך מקיפות, יישומים, יתרונות ומגבלות, גיליון נתונים והשוואה ל- CR2032
ב- 2024/01/25

מעבדים מיקרו -מעבדים לעומת מעגלים משולבים
ב- 2024/01/22
פוסטים פופולריים
-
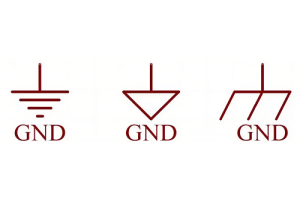
מה זה GND במעגל?
ב- 1970/01/1 3272
-

מדריך מחברים RJ-45: RJ-45 קודי צבע מחבר, תוכניות חיווט, יישומי R-J45, גיליון נתונים RJ-45
ב- 1970/01/1 2815
-
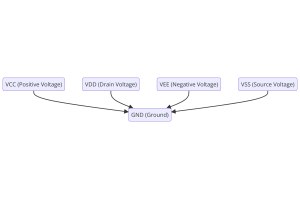
הבנת מתחי אספקת חשמל ב- Electronics VCC, VDD, VEE, VSS ו- GND
ב- 0400/11/20 2642
-

סוגי מחברי סיבים: SC לעומת LC ו- LC לעומת MTP
ב- 1970/01/1 2265
-

השוואה בין DB9 ל- RS232
ב- 1970/01/1 1882
-

מהי סוללת LR44?
חשמל, אותו כוח בכל מקום, מחלחל בשקט כל היבט בחיי היומיום שלנו, מגאדג'טים טריוויאליים ועד ציוד רפואי מסכן חיים, הוא ממלא תפקיד שקט.עם זאת, באמת לתפוס את האנרגיה הזו, במיוחד כיצד לאחסן ולהפוך אותה ביעילות, זו לא משימה קלה.זה ע...ב- 1970/01/1 1846
-
הבנת היסודות: התנגדות השראות, וציון
בריקוד המורכב של הנדסת חשמל, שלישיית אלמנטים בסיסיים עולה במרכז הבמה: השראות, התנגדות וקיבול.כל אחת מהן נושאת תכונות ייחודיות המכתיבות את המקצבים הדינמיים של מעגלים אלקטרוניים.כאן אנו יוצאים למסע לפענוח המורכבות של רכי...ב- 1970/01/1 1808
-
מה זה RF ולמה אנו משתמשים בזה?
טכנולוגיית תדר רדיו (RF) היא חלק מרכזי בתקשורת אלחוטית מודרנית, המאפשרת העברת נתונים למרחקים ארוכים ללא חיבורים פיזיים.מאמר זה מתעמק ביסודות ה- RF, ומסביר כיצד קרינה אלקטרומגנטית (EMR) מאפשרת תקשורת RF.נחקור את עקרונות ה- EMR, את...ב- 1970/01/1 1801
-

מדריך מקיף של CR2430 סוללה: מפרט, יישומים והשוואה לסוללות CR2032
מהי סוללת CR2430?היתרונות של סוללות CR2430נוֹרמָהיישומי סוללה CR2430CR2430 שווה ערךCR2430 לעומת CR2032גודל CR2430 סוללהמה לחפש בעת קניית CR2430 ושוויוןגיליון נתונים PDFשאלות נפוצות סוללות הן לבם של מכשירים אלקטרוניים קטנים.בין הסוגים הרבים הק...ב- 1970/01/1 1799
-
מדריך מקיף ל- HFE בטרנזיסטורים
טרנזיסטורים הם רכיבים מכריעים במכשירים אלקטרוניים מודרניים, המאפשרים הגברה ובקרה של אות.מאמר זה מתעמק בידע סביב HFE, כולל כיצד לבחור ערך HFE של טרנזיסטור, כיצד למצוא HFE ורווח של סוגים שונים של טרנזיסטורים.באמצעות חקירתנו ב- ...ב- 5600/11/20 1782
מספר חלק חם
-

BA5406
Rohm Semiconductor
IC AMP CLASS AB STEREO 5W 12SIP
MAX9938WEBS+TG45
Analog Devices Inc./Maxim Integrated
IC CURRENT SENSE 1 CIRCUIT 4UCSP
ZVNL120ASTOA
Diodes Incorporated
MOSFET N-CH 200V 180MA E-LINE
NCP15XF101J03RC
Murata Electronics
THERMISTOR NTC 100OHM 3250K 0402
HEDS-9140#A00
Broadcom Limited
ROTARY ENCODER OPTICAL 500PPR
MC7448HX1000ND
Freescale Semiconductor
RISC MICROPROCESSOR, 32-BIT, POW
ADM1066ASUZ
Analog Devices Inc.
IC SUPERVISOR 12 CHANNEL 48TQFP
DS1033Z-8
Analog Devices Inc./Maxim Integrated
IC DELAY LINE 8NS 8-SOIC
V18MLA1210NH
Littelfuse Inc.
VARISTOR 25V 500A 1210
MWCT1013VLHST
NXP USA Inc.
32BIT256K FLASHSTR CTM
04023A270KAT2A
KYOCERA AVX
CAP CER 27PF 25V NP0 0402
EL1529IL
Renesas Electronics America Inc
IC DRIVER 2/0 24QFN
RC0603FR-0724KL
YAGEO
RES 24K OHM 1% 1/10W 0603
L9700D
STMicroelectronics
TVS DEVICE MIXED 8SOIC
BZT55C3V3-GS08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 3.3V 500MW SOD80
C4532CH2J223K320KA
TDK Corporation
CAP CER 0.022UF 630V CH 1812
MAX4372TEUK+T
Analog Devices Inc./Maxim Integrated
IC CURR SENSE 1 CIRCUIT SOT23-5
SN75LBC179DR
Texas Instruments
IC TRANSCEIVER FULL 1/1 8SOIC -

F1857SD600
Sensata-Crydom
MODULE SCR/DIODE 55A 240VAC
AD5245BRJZ5-R2
Analog Devices Inc.
IC DGTL POT 5KOHM 256TAP SOT23-8
CDC3S04YFFR
Texas Instruments
IC CLK BUFFER 1:4 52MHZ 20DSBGA
MAX6829SFUT+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 2 CHANNEL SOT23-6
UCC3626PWTRG4
Texas Instruments
IC MOTOR DRVR 11V-14.5V 28TSSOP
JAN1N3344B
Microchip Technology
ZENER DIODE
9FG108EFILFT
Renesas Electronics America Inc
IC FREQ TIMING GENERATOR 48SSOP
XCZU19EG-1FFVB1517E
AMD
IC SOC CORTEX-A53 1517FCBGA
M27C4001-80XF1
STMicroelectronics
IC EPROM 4MBIT PARALLEL 32CDIP
SN75175D
Texas Instruments
IC RECEIVER 0/4 16SOIC
350714-1
TE Connectivity AMP Connectors
CONN HEADER VERT 15POS 6.35MM
MAX197AENI+
Analog Devices Inc./Maxim Integrated
IC DAS 12BIT 100K 28DIP
MC10H109FN
onsemi
IC 4-5 INPUT OR/NOR DUAL 20PLCC
AM4377BZDNA100
Texas Instruments
MOD ARM CORTEX-A9 491NFBGA
WSL2512R0100FEA18
Dale / Vishay
RES 0.01 OHM 1% 2W 2512
RT0402BRE07180RL
YAGEO
RES SMD 180 OHM 0.1% 1/16W 0402
DF12NB(3.0)-30DP-0.5V(51)
Hirose Electric Co Ltd
CONN HDR 30POS SMD GOLD
OPA835IDBVR
Texas Instruments
IC OPAMP VFB 1 CIRCUIT SOT23-6 -

PCI9656-BA66BIG
Broadcom Limited
PCI9656-BA66BI G
NJM2877F3-05-TE1
Nisshinbo Micro Devices Inc.
IC REG LINEAR 5V 150MA SC88A
MIC5245-3.3YM5
Micrel Inc.
150 MA MICROCAP CMOS LDO REGULAT
FOD617D300
Fairchild Semiconductor
TRANSISTOR OUTPUT OPTOCOUPLER
TAS3001CPW
Texas Instruments
IC AUDIO SIGNAL PROCESSR 28TSSOP
10061913-102CLF
Amphenol ICC (FCI)
CONN PCI EXP FMALE 98POS 0.039
C0402C561J5GAC7867
KEMET
CAP CER 560PF 50V C0G/NP0 0402
LCA182S
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 120MA 0-350V
SI4368DY-T1-E3
Vishay Siliconix
MOSFET N-CH 30V 17A 8SO
MAX13235EEUP+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 20TSSOP
LTC6912CGN-2#TRPBF
Analog Devices Inc.
IC OPAMP PGA 2 CIRCUIT 16SSOP
0603ZC472MAT2A
KYOCERA AVX
CAP CER 4700PF 10V X7R 0603
INA2332AIPWT
Texas Instruments
IC INST AMP 2 CIRCUIT 14TSSOP
TAJA107K004RNJ
KYOCERA AVX
CAP TANT 100UF 10% 4V 1206
74LVX08M
onsemi
IC GATE AND 4CH 2-INP 14SOIC
AD7820KN
Analog Devices Inc.
IC ADC 8BIT FLASH 20DIP
HSDL-5420
Lite-On Inc.
SENSOR PHOTODIODE 875NM 2SMD
LDB31900M05C-417
Murata Electronics
MULTI-LAY HYBRID BALUNS 1206