חקר בקר Atmega2560
בקר Atmega2560 מיקרו -בקר, נציג בולט של ארכיטקטורת AVR RISC, נחגג ביעילותו, בביצוע הוראות עוצמתיות במחזור שעון יחיד.מאמר זה צולל במפרט הבסיסי של AtmeGa2560, כולל הזיכרון המרחיב שלו, תצורת Pinout גמישה ופרוטוקולי תקשורת רב -תכליתיים כמו UART, SPI ו- I2C.בנוסף, נחקור את התכונות הבולטות והיישומים המגוונים שלה, מרובוטיקה ועד IoT, יחד עם תובנות עיצוביות מעשיות למקסום הפונקציונליות שלה.בין אם אתה מתכנן מערכות בקרה מורכבות או פתרונות חסכוניים באנרגיה, מאמר זה יספק את הידע למנף את הפוטנציאל המלא של AtmeGa2560 בפרויקטים שלך.קָטָלוֹג
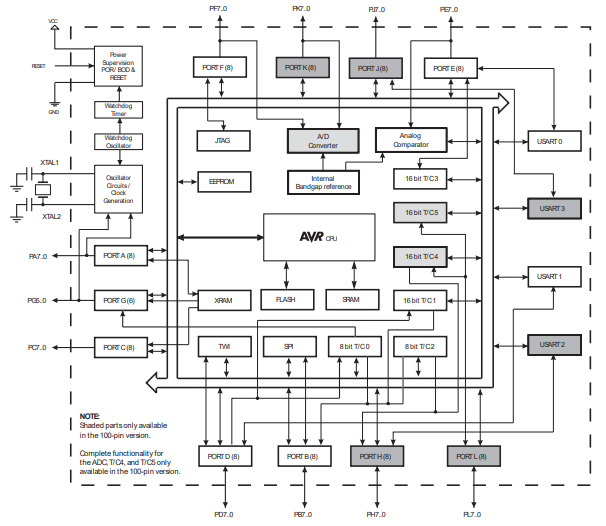
סקירה כללית של ATMEGA2560
THE ATMEGA2560 ממלא תפקיד אינטאלי כמיקרו -בקר בלוחות Arduino Mega 2560, שנחגג בגלל יכולתו בניהול יישומים חזקים ומורכבים כאחד.הוא מתפקד עם ארכיטקטורה מבוססת AVR RISC, הוא ממזג בצורה אופטימלית מהירות עיבוד עם שימור אנרגיה, ומבצע פקודות מורכבות במחזור שעון יחיד.תכונה זו אינה רק מושג מופשט;נהפוך הוא, מפתחים משאבים זאת באופן נרחב כדי ליצור מערכות אינטראקטיביות בצורה חלקה הפועלות בזמן אמת.
מעבר לתכנון המבני שלו, ATMEGA2560 מציג תערובת של ביצוע מהיר עם שימוש באנרגיה מודעת.הזריזות שלה בניהול משימות מורכבות הופכת אותה לבחירה מבוקשת לפרויקטים מודעים לאנרגיה.אכן, מומחים רבים בתעשייה רתמו באופן מיומן את הסינרגיה הזו כדי לתכנן תוכניות לניהול כוח בגאדג'טים תלויים בסוללות, ובכך מאריכים באופן משמעותי את התקופות התפקודיות שלהם מבלי להפחית את הביצועים.
יכולת ההסתגלות הרחבה של ATMEGA2560 מוצאת הדים במגזרים שונים, כמו רובוטיקה ומעקב אקולוגי.מגוון היקפי המשולב המשולב שלה משפר את מהירות הפיתוח ומפחית את ההסתמכות על חומרה נוספת, ומקל את מסע העיצוב.מפתחים מכירים לעתים קרובות את גמישותו ביצירת מערכות מודולריות הדורשות מדרגיות ואב -טיפוס מהיר;השתקפויות אלה צובעות על ידי התשוקה הלהט שלהם והערכות תובנות משלהם.
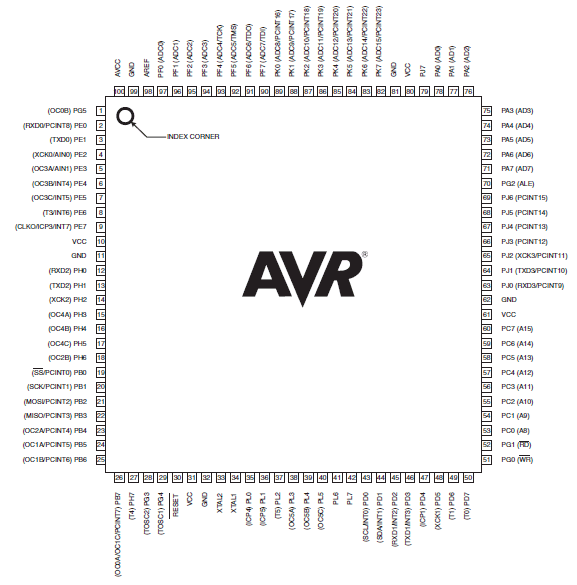
תצורת ATMEGA2560 PIN
|
מספר סיכה |
שם סיכה |
שם סיכה ממופה |
|
1 |
PG5 (OC0B) |
סיכה דיגיטלית 4 (PWM) |
|
2 |
PE0 (RXD0/PCINT8) |
סיכה דיגיטלית 0 (RX) |
|
3 |
PE1 (TXD0) |
סיכה דיגיטלית 1 (TX) |
|
4 |
PE2 (XCK0/AIN0) |
|
|
5 |
PE3 (OC3A/AIN1) |
סיכה דיגיטלית 5 (PWM) |
|
6 |
PE4 (OC3B/INT4) |
סיכה דיגיטלית 2 (PWM) |
|
7 |
PE5 (OC3C/INT5) |
סיכה דיגיטלית 3 (PWM) |
|
8 |
PE6 (T3/Int6) |
|
|
9 |
PE7 (CLK0/ICP3/INT7) |
|
|
10 |
VCC |
VCC |
|
11 |
GND |
GND |
|
12 |
PH0 (RXD2) |
סיכה דיגיטלית 17 (RX2) |
|
13 |
PH1 (TXD2) |
סיכה דיגיטלית 16 (TX2) |
|
14 |
Ph2 (xck2) |
|
|
15 |
PH3 (OC4A) |
סיכה דיגיטלית 6 (PWM) |
|
16 |
PH4 (OC4B) |
סיכה דיגיטלית 7 (PWM) |
|
17 |
Ph5 (OC4C) |
סיכה דיגיטלית 8 (PWM) |
|
18 |
Ph6 (OC2B) |
סיכה דיגיטלית 9 (PWM) |
|
19 |
PB0 (SS/PCINT0) |
סיכה דיגיטלית 53 (SS) |
|
20 |
PB1 (SCK/PCINT1) |
סיכה דיגיטלית 52 (SCK) |
|
21 |
PB2 (MOSI/PCINT2) |
סיכה דיגיטלית 51 (MOSI) |
|
22 |
PB3 (MISO/PCINT3) |
סיכה דיגיטלית 50 (מיסו) |
|
23 |
PB4 (OC2A/PCINT4) |
סיכה דיגיטלית 10 (PWM) |
|
24 |
PB5 (OC1A/PCINT5) |
סיכה דיגיטלית 11 (PWM) |
|
25 |
PB6 (OC1B/PCINT6) |
סיכה דיגיטלית 12 (PWM) |
|
26 |
PB7 (OC0A/OC1C/PCINT7) |
סיכה דיגיטלית 13 (PWM) |
|
27 |
Ph7 (T4) |
|
|
28 |
PG3 (TOSC2) |
|
|
29 |
PG4 (TOSC1) |
|
|
30 |
אִתחוּל |
אִתחוּל |
|
31 |
VCC |
VCC |
|
32 |
GND |
GND |
|
33 |
XTAL2 |
XTAL2 |
|
34 |
XTAL1 |
XTAL1 |
|
35 |
PL0 (ICP4) |
סיכה דיגיטלית 49 |
|
36 |
PL1 (ICP5) |
סיכה דיגיטלית 48 |
|
37 |
PL2 (T5) |
סיכה דיגיטלית 47 |
|
38 |
PL3 (OC5A) |
סיכה דיגיטלית 46 (PWM) |
|
39 |
PL4 (OC5B) |
סיכה דיגיטלית 45 (PWM) |
|
40 |
PL5 (OC5C) |
סיכה דיגיטלית 44 (PWM) |
|
41 |
Pl6 |
סיכה דיגיטלית 43 |
|
42 |
PL7 |
סיכה דיגיטלית 42 |
|
43 |
PD0 (SCL/int0) |
סיכה דיגיטלית 21 (SCL) |
|
44 |
PD1 (SDA/INT1) |
סיכה דיגיטלית 20 (SDA) |
|
45 |
PD2 (RXD1/INT2) |
סיכה דיגיטלית 19 (RX1) |
|
46 |
PD3 (TXD1/INT3) |
סיכה דיגיטלית 18 (TX1) |
|
47 |
PD4 (ICP1) |
|
|
48 |
PD5 (XCK1) |
|
|
49 |
PD6 (T1) |
|
|
50 |
PD7 (T0) |
סיכה דיגיטלית 38 |
|
51 |
PG0 (WR) |
סיכה דיגיטלית 41 |
|
52 |
PG1 (RD) |
סיכה דיגיטלית 40 |
|
53 |
PC0 (A8) |
סיכה דיגיטלית 37 |
|
54 |
PC1 (A9) |
סיכה דיגיטלית 36 |
|
55 |
PC2 (A10) |
סיכה דיגיטלית 35 |
|
56 |
PC3 (A11) |
סיכה דיגיטלית 34 |
|
57 |
PC4 (A12)
|
סיכה דיגיטלית 33 |
|
58 |
PC5 (A13) |
סיכה דיגיטלית 32 |
|
59 |
PC6 (A14) |
סיכה דיגיטלית 31 |
|
60 |
PC7 (A15) |
סיכה דיגיטלית 30 |
|
61 |
VCC |
|
|
62 |
GND |
|
|
63 |
PJ0 (RXD3/PCINT9) |
סיכה דיגיטלית 15 (RX3) |
|
64 |
PJ1 (TXD3/PCINT10) |
סיכה דיגיטלית 14 (TX3) |
|
65 |
PJ2 (XCK3/PCINT11) |
|
|
66 |
PJ3 (PCINT12) |
|
|
67 |
PJ4 (PCINT13) |
|
|
68 |
PJ5 (PCINT14) |
|
|
69 |
PJ6 (PCINT15) |
|
|
70 |
PG2 (Ale) |
סיכה דיגיטלית 39 |
|
71 |
PA7 (AD7) |
סיכה דיגיטלית 29 |
|
72 |
PA6 (AD6) |
סיכה דיגיטלית 28 |
|
73 |
PA5 (AD5) |
סיכה דיגיטלית 27 |
|
74 |
PA4 (AD4) |
סיכה דיגיטלית 26 |
|
75 |
PA3 (AD3) |
סיכה דיגיטלית 25 |
|
76 |
PA2 (AD2) |
סיכה דיגיטלית 24 |
|
77 |
PA1 (AD1) |
סיכה דיגיטלית 23 |
|
78 |
PA0 (AD0) |
סיכה דיגיטלית 22 |
|
79 |
PJ7 |
|
|
80 |
VCC |
VCC |
|
81 |
GND |
GND |
|
82 |
PK7 (ADC15/PCINT23) |
סיכה אנלוגית 15 |
|
83 |
PK6 (ADC14/PCINT22) |
סיכה אנלוגית 14 |
|
84 |
PK5 (ADC13/PCINT21) |
סיכה אנלוגית 13 |
|
85 |
PK4 (ADC12/PCINT20) |
סיכה אנלוגית 12 |
|
86 |
PK3 (ADC11/PCINT19) |
סיכה אנלוגית 11 |
|
87 |
PK2 (ADC10/PCINT18) |
סיכה אנלוגית 10 |
|
88 |
PK1 (ADC9/PCINT17) |
סיכה אנלוגית 9 |
|
89 |
PK0 (ADC8/PCINT16) |
סיכה אנלוגית 8 |
|
90 |
PF7 (ADC7/TDI) |
סיכה אנלוגית 7 |
|
91 |
PF6 (ADC6/TMO) |
סיכה אנלוגית 6 |
|
92 |
PF5 (ADC5/TMS) |
סיכה אנלוגית 5 |
|
93 |
PF4 (ADC4/TCK) |
סיכה אנלוגית 4 |
|
94 |
PF3 (ADC3) |
סיכה אנלוגית 3 |
|
95 |
PF2 (ADC2) |
סיכה אנלוגית 2 |
|
96 |
PF1 (ADC1) |
סיכה אנלוגית 1 |
|
97 |
PF0 (ADC0) |
סיכה אנלוגית 0 |
|
98 |
AREF |
התייחסות אנלוגית |
|
99 |
GND |
GND |
|
100 |
AVCC |
VCC |
מודל CAD
סֵמֶל
עָקֵב
ייצוג תלת מימד
מפרטים טכניים
להלן הטבלה למפרט הטכני, התכונות, הפרמטרים והחלקים הדומים לטכנולוגיית מיקרו -צ'יפס Atmega2560-16AUו
|
סוּג |
פָּרָמֶטֶר |
|
זמן ההובלה של המפעל |
7 שבועות |
|
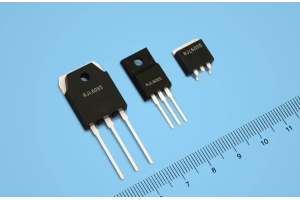
הַר |
הר השטח |
|
סוג הרכבה |
הר השטח |
|
חבילה / מקרה |
100-TQFP |
|
מספר הסיכות |
100 |
|
ממירי נתונים |
A/d 16x10b |
|
מספר I/OS |
86 |
|
טיימרים של כלב השמירה |
כֵּן |
|
טמפרטורת הפעלה |
-40 מעלות צלזיוס ~ 85 מעלות צלזיוס |
|
אריזה |
מַגָשׁ |
|
סִדרָה |
AVR® ATMEGA |
|
פורסם |
2009 |
|
קוד JESD-609 |
E3 |
|
קוד PBFREE |
כֵּן |
|
סטטוס חלק |
פָּעִיל |
|
רמת רגישות לחות (MSL) |
3 (168 שעות) |
|
מספר הסיומות |
100 |
|
סִיוּם |
SMD/SMT |
|
סיום מסוף |
פח מט (SN) - מבולבל |
|
תכונה נוספת |
פועל גם על אספקת מינימום של 2.7 וולט במהירות 8 מגה הרץ |
|
מיקום מסוף |
מְרוּבָּע |
|
צורת מסוף |
אגף שחף |
|
טמפרטורת שיא מחדש (° C) |
260 |
|
מתח אספקה |
5V |
|
מגרש מסוף |
0.5 מ"מ |
|
תֶדֶר |
16MHz |
|
זמן@טמפרטורות שיא מחדש (ים) |
40 |
|
מספר חלק בסיס |
ATMEGA2560 |
|
מתח אספקת הפעלה |
5V |
|
ספקי כוח |
5V |
|
מִמְשָׁק |
2 חוטי, ebi/emi, i2c, spi, uart, usart |
|
גודל זיכרון |
256KB |
|
סוג מתנד |
פְּנִימִי |
|
גודל זיכרון RAM |
8K x 8 |
|
מתח - אספקה (VCC/VDD) |
4.5V ~ 5.5V |
|
UPS/UCS/סוג ICS היקפי |
בקר מיקרו, ריסק |
|
מעבד ליבה |
אבר |
|
ציוד היקפי |
גילוי/איפוס חום-אאוט, POR, PWM, WDT |
|
סוג זיכרון התוכנית |
הֶבזֵק |
|
גודל ליבה |
8 סיביות |
|
גודל זיכרון התוכנית |
256KB 128K x 16 |
|
קישוריות |
EBI/EMI, I2C, SPI, UART/USART |
|
גודל סיביות |
8 |
|
זמן גישה |
16 מיקרו |
|
יש ל- ADC |
כֵּן |
|
ערוצי DMA |
לֹא |
|
רוחב אוטובוס נתונים |
8b |
|
מספר טיימרים/דלפקים |
6 |
|
צְפִיפוּת |
2 מגה |
|
גודל EEPROM |
4K x 8 |
|
מספר ערוצי ADC |
16 |
|
מספר ערוצי PWM |
12 |
|
מספר ערוצי i2c |
1 |
|
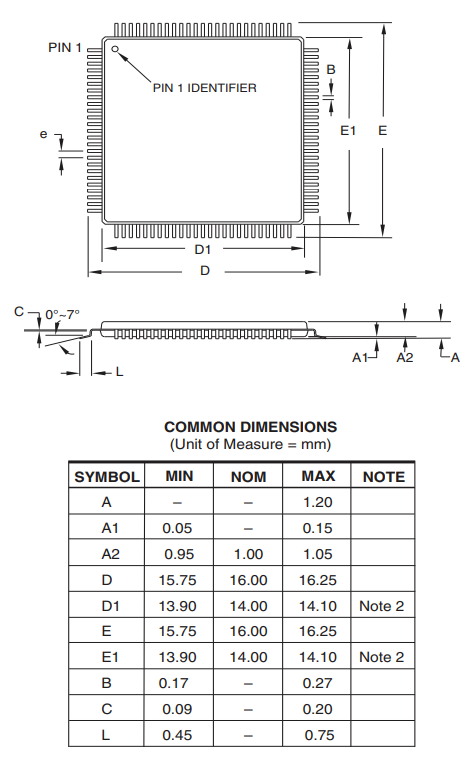
גוֹבַה |
1.05 מ"מ |
|
מֶשֶׁך |
14.1 מ"מ |
|
רוֹחַב |
14.1 מ"מ |
|
להגיע ל- SVHC |
אין SVHC |
|
התקשות קרינה |
לֹא |
|
סטטוס ROHS |
תואם ROHS3 |
|
עופרת חופשית |
עופרת חופשית |
תכונות
|
קטגוריית תכונות |
תכונה |
|
קטעי זיכרון לא-נדיפים בעלי סיבולת גבוהה |
מחזורי כתיבה/מחיקה: 10,000 פלאש |
|
תמיכה בספריית Qtouch Atmel |
כֵּן |
|
ממשק JTAG |
IEEE STD.1149.1 תואם |
|
תכונות היקפיות |
מונה בזמן אמת עם מתנד נפרד |
|
טיימר כלב שמירה לתכנות עם שבב נפרד
מַתנֵד |
|
|
משווה אנלוגי על שבב |
|
|
להפריע ולהתעורר עם שינוי סיכה |
|
|
תכונות מיוחדות אחרות |
איפוס כוח וזיהוי חום-אאוט הניתן לתכנות |
|
מתנד מכויל פנימי |
|
|
מקורות הפרעה חיצוניים ופנימיים |
|
|
מצבי שינה |
שישה מצבים: סרק, הפחתת רעש של ADC, שמור כוח,
כוח-למטה, המתנה, המתנה מורחבת |
יישומים
בקר Atmega2560 מיקרו, שנחגג בזכות יכולות הביצועים החריגות שלו, משמש בסיס ליישומי טכנולוגיה עכשוויים רבים.אימוץ הרחב שלו מונע על ידי יכולת ההסתגלות והאמינות שלה על פני מספר פרויקטים, ובאופן יעיל פותר צרכי מערכת מורכבים ברמת דיוק ראויה לציון.
חידושים להדפסת תלת מימד
בתוך ענף הדפסת התלת מימד, ATMEGA2560 ממלא תפקיד מפתח בניהול תנועת המדפסות והבטחת המיקום הקפדני של כל שכבה.כוח העיבוד המתוחכם שלה מנהל אלגוריתמים מורכבים, ומבטיח תוצאות באיכות גבוהה.על ידי תיאום מדויק של פעולות מוטוריות וחילקת נימה, זה משפר משמעותית את הרזולוציה והדיוק ההדפסה.לעתים קרובות אתה יכול לנצל את סיכות הקלט/פלט הרחבות של בקר המיקרו -בקר כדי לחבר מערך של חיישנים ונהגי מנוע, ומאפשרים תנועות מפורטות.חוויות מדגימות כי אופטימיזציות קושחה מותאמות למדפסות תלת מימד ספציפיות יכולות בעיקר להעלות את איכות ההדפסה ולחתוך את זמן הייצור, ולהדגיש את אופיו הגמיש של בקר המיקרו.
בקרת מנוע
ATMEGA2560 מוצא יישום נרחב במערכות בקרה מוטוריות, ומאפשר ביצוע אלגוריתמי בקרה מורכבים לביצועים מוטוריים אמינים.זה מספק ויסות מהירות יעילה ובקרת כיוון, המועיל במיוחד במערכות רובוטיות ותעשייתיות הדורשות דיוק תפעולי מדויק.בפועל, שילוב חיישני משוב עם ATMEGA2560 משפר את הביצועים על ידי עדכון ברציפות של פרמטרים תפעוליים.לעיתים קרובות אתה יכול להדגיש את הערך של בדיקות וכיול איטרטיבי כדי להשיג שליטה מוטורית מעולה, מה שמוביל לתפוקה מוגברת ולמציעות המערכת.
ממשק חיישן
עבור ממשקי חיישנים, בקר המיקרו מהווה בסיס לשילוב חיישנים אנלוגיים ודיגיטליים מגוונים, לעיבוד הנתונים שלהם כדי לספק תובנות ניתנות לפעולה.יכולת זו פעילה במערכות בהן איסוף ופיקוח על נתונים סביבתיים הם אולטימטיביים, כמו בתחנות מזג אוויר ובערים חכמות.אתה יכול להדגיש את היתרונות של זיקוק טכניקות רכישת נתונים ואלגוריתמים לעיבוד אותות כדי להגביר את אמינות קריאות החיישנים.גישות מעודנות אלה תורמות לפיתוח מערכות ניטור מוסמכות ומגיבות יותר.
איתור טמפרטורה מקיף
במערכות גילוי טמפרטורה, ATMEGA2560 מצטיין על ידי ניהול מספר כניסות חיישנים בו זמנית, ותומך במעקב תרמי נרחב בפועל.יכולת העיבוד החזקה שלה מבטיחה קריאות טמפרטורה מדויקות, המשמשות ליישומים במערכות בקרת אקלים ובטיחות.ליישם מסלולי חישה מיותרים מומלץ לרוב להעצמת אמינות המערכת, תרגול מועיל בעיקר בסביבות בהן משתמשים ביציבות הטמפרטורה.זה ממחיש שיווי משקל בין הנדסה חדשנית לבין אמינות מעשית.
יישומי בית חכם ו- IoT
בתחום האוטומציה הביתית ומערכות ה- IoT, Atmega2560 מעצים פונקציות מתקדמות, החל מוויסות אורות ומכשירים ועד לאפשר פתרונות אבטחה ביתיים מתוחכמים.תכונות הקישוריות שלה מבטיחות שילוב חלק עם פרוטוקולי תקשורת שונים, ומטפחים מערכת אקולוגית מגובשת.אתה יכול לדאוג לבחינת מערכות היברידיות המשתמשות בטכנולוגיות חוטיות ואלחוטיות כאחד כדי להשיג איזון אופטימלי של ביצועים ואמינות.אינטגרציה זו גורמת לרוב לחוויות מעולות ולמרחבי חיים אינטליגנטים יותר.
אלטרנטיבות
• • ATMEGA128
• • ATMEGA88
סכמטי
חֲבִילָה
יַצרָן
Microchip Technology Inc., הממוקמת באזור התוסס של צ'נדלר, אריזונה, עומדת כיוצר מפורסם ברחבי העולם של פתרונות מיקרו-בקר חדישים.המרדף הבלתי מעורער של החברה בחדשנות ואמינות של החברה גילף אותו למקום בולט בתעשיית האלקטרוניקה התחרותית.
בקרי מיקרו, המודגמים על ידי ATMEGA2560 של Microchip, הם בסיסיים בהפעלת אינספור גאדג'טים אלקטרוניים כיום.השימושים שלהם מועסקים במגוון רחב של מכשירים, ונמשכים בין אלקטרוניקה צרכנית בסיסית למערכות תעשייתיות מורכבות.יכולת הסתגלות זו מהווה עדות להשפעתם מכיוון שהם ממלאים תפקידים עיקריים בעיצוב דפוסי היעילות, הביצועים והצריכה של האנרגיה של המכשיר.
גיליון נתונים PDF
גיליונות נתונים של Atmega2560-16AU:
עלינו
ALLELCO LIMITED
קרא עוד
חקירה מהירה
אנא שלח בירור, נגיב מייד.
שאלות נפוצות [FAQ]
1. האם Arduino משתמש ב- Atmega2560?
מגה 2560 של Arduino, המופעל על ידי בקר המיקרו Atmega2560, בולט ביכולתו לנהל פעולות מורכבות, בהקלה במידה רבה על ידי סיכות הקלט/פלט השופעות שלו וזיכרון סקיצה משמעותי.תכונות אלה מציעות יתרונות משמעותיים למאמצים כמו הדפסת תלת מימד ורובוטיקה מתוחכמת.אתה יכול למצוא את יכולת ההסתגלות שלה מועילה בהרחבת יכולות הפרויקט.רבים מדגישים כיצד הסיכות הנרחבות ויכולת העיבוד מאפשרות תיאום נתונים בו זמנית ושילוב היקפי, המשפר את המורכבות וההגעה של פרויקטים מורכבים.
2. האם יש גרסת טבילה של ATMEGA2560?
גרסת חבילת DIP עבור ATMEGA2560 אינה קיימת, כאשר ה- ATMEGA1284 הוא התחליף הקרוב ביותר מבחינת יכולת הזיכרון.עם זאת, זה נופל בסיכות קלט/פלט ונמלים סדרתיים, דוחף התחשבות לעבר פשרות בין גודל לרוחב תפעולי.בניווט בשטח זה, תוכלו לבחור בטכנולוגיית הרכבה על פני השטח בכדי להתאים לדרישות קלט/פלט נרחבות, למרות אתגרי ההרכבה והתיקון המוגדלים שלה.
3. כיצד אוכל לשרוף מטען אתחול ל- Arduino Atmega2560?
הגדרת מטען אתחול ב- ATMEGA2560 דורשת כלים ספציפיים כמו USBTINYISP ונוהל ברור נגיש דרך IDE Arduino.שליטה בטכניקה זו מועילה לשחרור היכולות המלאות של מיקרו -בקר, ומאפשרת התקנות קושחה בהתאמה אישית וביצועי שיא.לעתים קרובות ניתן לראות ששיטת התקנת האתחול האמינה מחזקת משמעותית את עקביות הפיתוח וניצחון הפרויקט.
4. מהו המתכנת הטוב ביותר ATMEGA2560?
קרח ה- Atmel בולט ככלי מועדף לתכנות וניפוי של בקרי מיקרו של AtmeGa2560, שזכו לשבחים על תאימותה הנרחבת למכשירי Arm® Cortex®-M ו- AVR.כוחו טמון ביכולתו להתמודד ביעילות במשימות ניפוי מגוונות, ובכך להקל על זרימת העבודה של הפיתוח.אתה יודע שבבעלות על מתכנת ברמה גבוהה כמו קרח האטמפל יכולה לשפר את יעילות ניפוי באגים, ומשפיעה לטובה על לוחות הזמנים של הפרויקטים.

TMC2208 לעומת TMC2209: איזה נהג צעד מתאים לך?
ב- 2024/11/13

מודול Bluetooth HC-06: יישומים, חיבור ארדואינו ומפרט
ב- 2024/11/12
פוסטים פופולריים
-
מה זה GND במעגל?
ב- 1970/01/1 3170
-

מדריך מחברים RJ-45: RJ-45 קודי צבע מחבר, תוכניות חיווט, יישומי R-J45, גיליון נתונים RJ-45
ב- 1970/01/1 2747
-
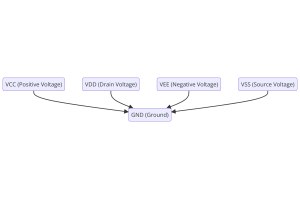
הבנת מתחי אספקת חשמל ב- Electronics VCC, VDD, VEE, VSS ו- GND
ב- 0400/11/17 2399
-

סוגי מחברי סיבים: SC לעומת LC ו- LC לעומת MTP
ב- 1970/01/1 2216
-

השוואה בין DB9 ל- RS232
ב- 1970/01/1 1835
-

מהי סוללת LR44?
חשמל, אותו כוח בכל מקום, מחלחל בשקט כל היבט בחיי היומיום שלנו, מגאדג'טים טריוויאליים ועד ציוד רפואי מסכן חיים, הוא ממלא תפקיד שקט.עם זאת, באמת לתפוס את האנרגיה הזו, במיוחד כיצד לאחסן ולהפוך אותה ביעילות, זו לא משימה קלה.זה ע...ב- 1970/01/1 1807
-
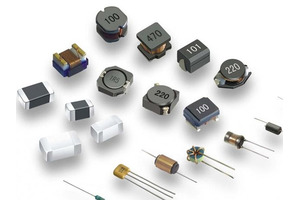
הבנת היסודות: התנגדות השראות, וציון
בריקוד המורכב של הנדסת חשמל, שלישיית אלמנטים בסיסיים עולה במרכז הבמה: השראות, התנגדות וקיבול.כל אחת מהן נושאת תכונות ייחודיות המכתיבות את המקצבים הדינמיים של מעגלים אלקטרוניים.כאן אנו יוצאים למסע לפענוח המורכבות של רכי...ב- 1970/01/1 1763
-

מדריך מקיף של CR2430 סוללה: מפרט, יישומים והשוואה לסוללות CR2032
מהי סוללת CR2430?היתרונות של סוללות CR2430נוֹרמָהיישומי סוללה CR2430CR2430 שווה ערךCR2430 לעומת CR2032גודל CR2430 סוללהמה לחפש בעת קניית CR2430 ושוויוןגיליון נתונים PDFשאלות נפוצות סוללות הן לבם של מכשירים אלקטרוניים קטנים.בין הסוגים הרבים הק...ב- 1970/01/1 1730
-
מה זה RF ולמה אנו משתמשים בזה?
טכנולוגיית תדר רדיו (RF) היא חלק מרכזי בתקשורת אלחוטית מודרנית, המאפשרת העברת נתונים למרחקים ארוכים ללא חיבורים פיזיים.מאמר זה מתעמק ביסודות ה- RF, ומסביר כיצד קרינה אלקטרומגנטית (EMR) מאפשרת תקשורת RF.נחקור את עקרונות ה- EMR, את...ב- 1970/01/1 1722
-
מדריך מקיף ל- HFE בטרנזיסטורים
טרנזיסטורים הם רכיבים מכריעים במכשירים אלקטרוניים מודרניים, המאפשרים הגברה ובקרה של אות.מאמר זה מתעמק בידע סביב HFE, כולל כיצד לבחור ערך HFE של טרנזיסטור, כיצד למצוא HFE ורווח של סוגים שונים של טרנזיסטורים.באמצעות חקירתנו ב- ...ב- 5600/11/17 1698
מספר חלק חם
-
SPM1423HM4H-B
Knowles
MIC MEMS DIGITAL PDM OMNI -22DB
ATF1504AS-15AC100
Microchip Technology
IC CPLD 64MC 15NS 100TQFP
TPS2013AD
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 8SOIC
PCF51QU64VLF
Freescale Semiconductor
IC MCU 32BIT 64KB FLASH 48LQFP
1812SC502KAT1A
KYOCERA AVX
CAP CER 5000PF 1.5KV X7R 1812
NSI45025ZT1G
onsemi
IC CURRENT REGULATOR 15% SOT223
DS1230Y-120+
Analog Devices Inc./Maxim Integrated
IC NVSRAM 256KBIT PAR 28EDIP
EP4SE820F43C4N
Intel
IC FPGA 1120 I/O 1760FBGA
2N6798
Microsemi Corporation
MOSFET N-CH 200V 5.5A TO39
SI7892BDP-T1-GE3
Vishay Siliconix
MOSFET N-CH 30V 15A PPAK SO-8
IXBH16N170
IXYS
IGBT 1700V 40A 250W TO247AD
1S2838-T1B
Renesas Electronics America Inc
HIGH SPEED DOUBLE DIODE
650947-5
TE Connectivity AMP Connectors
CONN DIN PLUG 96POS PCB RA GOLD
LT1460EIS8-2.5#PBF
Analog Devices Inc.
IC VREF SERIES 0.125% 8SOIC
06035C392JAT2A
KYOCERA AVX
CAP CER 3900PF 50V X7R 0603
LM361H
Texas Instruments
IC COMPARATOR 2 DIFF TO100-10
VI-20L-14
Vicor Corporation
VI-20L-14 12V/28V 75W SMD
DDC101U
Texas Instruments
IC ADC 20BIT ADAPTV DELTA 24SOIC -

AP1501A-T5L-U
Diodes Incorporated
IC REG BUCK ADJ 5A TO220-5
AD7664AST
Analog Devices Inc.
IC ADC 16BIT UNIPOLAR 48-LQFP
HMC1031MS8ETR
Analog Devices Inc.
IC CLOCK GEN INT-N PLL 8-MS8E
MIC2551AYML25-TR
Microchip Technology
IC TRANSCEIVER HALF 1/1 14MLF
1210YG685ZAT2A
KYOCERA AVX
CAP CER 6.8UF 16V Y5V 1210
LCMXO1200C-5TN100C
Lattice Semiconductor Corporation
IC FPGA 73 I/O 100TQFP
RC1608J103CS
Samsung Electro-Mechanics
RES SMD 10K OHM 5% 1/10W 0603
AT89C5115-TISUM
Microchip Technology
IC MCU 8BIT 16KB FLASH 28SOIC
CL21A106KOFNNNG
Samsung Electro-Mechanics
CAP CER 10UF 16V X5R 0805
MAZS051GML
Panasonic Electronic Components
DIODE ZENER 5.1V 150MW SSMINI2
NTP6413ANG
onsemi
POWER MOSFET 100V 42A, SINGLE N-
VUO190-12NO7
IXYS
BRIDGE RECT 3P 1.2KV 248A PWS-E1
STOTG04ESQTR
STMicroelectronics
IC TRANSCEIVER 1/1 24QFN
MPMT1003AT1
Vishay Dale Thin Film
RES NTWRK 2 RES 50K, 50K OHM
DSP56321VF220
NXP USA Inc.
IC DSP 24BIT 220MHZ 196MAPBGA
TMS320VC5509AZHH
Texas Instruments
IC FIXED POINT DSP 179-BGA
ADS7890IPFBT
Texas Instruments
IC ADC 14BIT SAR 48TQFP
2N6786
Harris Corporation
N-CHANNEL POWER MOSFET -
OPB706B
onsemi
SWITCH IR SLOTTED TRANS PC MNT
LTC1929IG-PG#TRPBF
Analog Devices Inc.
IC REG CTRLR BUCK 28SSOP
SMBJ17CA
Bourns Inc.
TVS DIODE 17VWM 27.6VC SMB
MAX764CSA
Analog Devices Inc./Maxim Integrated
IC REG BCK BST ADJ/-5V 8SOIC
BAV199DWQ-7-F
Diodes Incorporated
DIODE ARRAY GP 85V 140MA SOT363
GRM0225C1E6R6BA03L
Murata Electronics
CAP CER 6.6PF 25V C0G/NP0 01005
18125C335MAZ2A
KYOCERA AVX
CAP CER 3.3UF 50V X7R 1812
LMK00338RTAR
Texas Instruments
IC CLK BUF 400MHZ 1CIRC 40WQFN
ESDA6V1U1
STMicroelectronics
TVS DIODE 5VWM 8-SOIC
SM6T68CA
STMicroelectronics
TVS DIODE 58.1VWM 121VC SMB
GRM1556P1H7R7DZ01D
Murata Electronics
CAP CER 7.7PF 50V P2H 0402
TLD11141EPXUMA1
Ampleon USA Inc.
TLD1114 - LITIX Single Channel,
S912XHZ512F1VAG
NXP USA Inc.
IC MCU 16BIT 512KB FLASH 144LQFP
1704671038
Molex
IMPACT 3X8 UNGUIDED 100OHM DC .3
045101.5MRL
Littelfuse Inc.
FUSE BRD MNT 1.5A 125VAC/VDC SMD
EL3012S(TA)
Everlight Electronics Co Ltd
OPTOISOLATOR 5KV TRIAC 6SMD
PI3DBS12212AZBSEX
Diodes Incorporated
IC MUX/DEMUX 2:4 20TQFN
AK4203ET
Asahi Kasei Microdevices/AKM
IC LINE AMP AV CAPLESS 16TSSOP