סקירה מקיפה של מיקרו-בקר ATMEGA16A-AU: תכונות, מפרטים ויישומים
קָטָלוֹג
ה- Atmega16a-Au הוא בקר מיקרו חזק המספק פיתרון גמיש וחסכוני ביותר עבור יישומי בקרה משובצים רבים.הוא נמצא בשימוש נרחב בתחומים רבים כמו בתים חכמים, מערכות אלקטרוניות לרכב ואוטומציה תעשייתית.במאמר זה נחקור כמה נקודות מפתח הקשורות ל- AtmeGa16A-AU כך שתוכלו להשיג הבנה מעמיקה יותר של מכשיר זה.
סקירה כללית של ATMEGA16A-AU
ATMEGA16A-AU הוא בקר מיקרו משובץ המיוצר על ידי מיקרו -צ'יפ טכנולוגיה.הוא ארוז ב- QFP בן 44 פינים והוא מבקר CMOS בעל ביצועים נמוכים של 16 סיביות.מכשיר זה מצויד ב -26 קילוגרם של זיכרון תוכנית פלאש עם תכנות עצמית, 1024B של SRAM, 512 בתים של EEPROM, ממיר A/D של 8 ערוצים 10 סיביות וממשק JTAG לבחינת שבב.ה- ATMEGA16A-AU, הפועל מ- 2.7 ל- 5.5V, מסוגל לתפוקה של עד 16 MIPS בתדר שעון של 16 מגה הרץ.על ידי ביצוע הוראות עוצמתיות במחזור שעון אחד, המכשיר משיג תפוקה של כמעט 1 MIPS/MHz, מה שמאפשר למשתמשים את הגמישות לייעל את צריכת החשמל ומהירות העיבוד.בנוסף, לשבב רוחב של 10 מ"מ והמבנה הקומפקטי שלו הופך אותו לאידיאלי למכשירים אלקטרוניים קטנים יותר.Atmega16a-Au שייך לסדרת Atmega16, ובני משפחתה כוללים גם Atmega16a, Atmega16L, Atmega16hvb ו- Atmega16m1.
אלטרנטיבות ומקבילות:
• • ATMEGA16A-AUR
• • ATMEGA16L-8AU
• ATMEGA162L-8AI
• • ATMEGA164P-A15AZ
• ATMEGA324P-15AT
מאפיינים של Atmega16a-Au
• תכנות במערכת על ידי תוכנית אתחול על שבב
• ארכיטקטורת RISC מתקדמת
• פעולת קריאה אמיתית-כתיבה
• קטעי זיכרון לא נדיפים של סיבולת גבוהה
• ממשק JTAG (IEEE STD. 1149.1 תואם)
• בקר מיקרו-סיביות בעל ביצועים גבוהים, בעל עוצמה נמוכה של 8 סיביות
מבנה ופונקציות של Atmega16a-au
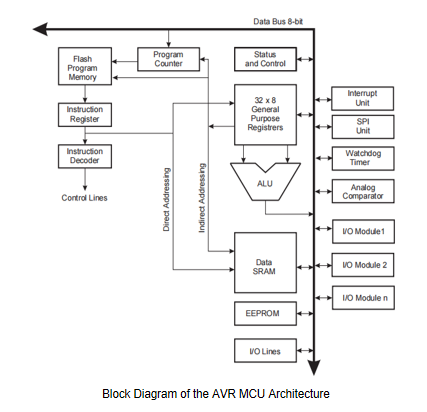
מעבד AVR: בקר המיקרו של AVR מאמץ את ארכיטקטורת הרווארד, שמבין את הפרדת אחסון התוכנית והנתונים, ובכך משפר את יכולת הביצועים ואת יכולת העיבוד המקבילה.ביצוע ההוראות שלו מתבצע באמצעות צינור חד-שלבי, ומבטיח פעולה יעילה.זיכרון התוכנית מעסיק טכנולוגיית פלאש ניתנת לתכנות מחדש, מה שמקל על עדכוני התוכנית ושדרוגים.בנוסף, בקר המיקרו מצויד בקובץ רישום של גישה מהירה התומך בפעולות יחידת היחידה לוגיקה של מחזור יחיד (ALU).ראוי להזכיר כי חלק מהרישומים יכולים לשמש גם כמצביעים עקיפים של רישום כתובות, מה שמשפר את היעילות של חישובי הכתובות.ה- ALU תומך במגוון רחב של פעולות חשבון והגיוניות ומעדכן את פנקס המצב בזמן אמת לאחר סיום הפעולה, המספק למשתמש מידע בזמן אמת על מצב הפעולה.
זיכרון פלאש: ATMEGA16A-AU משלב זיכרון פלאש של 16KB לאחסון תוכניות ומשתמש של משתמש.זיכרון פלאש זה ניתן להערכה מחדש, ומאפשר עדכונים גמישים במהלך פיתוח ופריסה של יישומים.
זיכרון EEPROM: בנוסף לזיכרון הפלאש, ATMEGA16A-AU מספק 512 בתים של זיכרון EEPROM, המשמש בדרך כלל לאחסון פרמטרי תצורה או נתוני משתמש הדורשים עדכונים תכופים.
זיכרון SRAM: בקר המיקרו ATMEGA16A-AU מכיל גם 1KB של זיכרון אקראי סטטי (SRAM) לאחסון זמני של נתונים ומשתנים במהלך ביצוע התוכנית.
פלט PWM: דרך טיימר/מונה וסיכות GPIO, ATMEGA16A-AU יכול לייצר אותות PWM ליישומים כמו בקרת מהירות המנוע והתאמת בהירות LED.
טיימר/מונה: בקר מיקרו זה מכיל מספר טיימר/דלפקים שניתן להשתמש בהם כדי ליצור אותות אפנון רוחב דופק (PWM), למדוד מרווחי זמן ולבצע פעולות תזמון.
ממשקים מרובים: ATMEGA16A-AU מספק קבוצה עשירה של ממשקים חיצוניים, כולל מספר סיכות קלט/פלט לשימוש כללי (GPIO) לחיבור בין מכשירים וחיישנים חיצוניים.בנוסף, הוא מספק ממשקי תקשורת נפוצים כמו ממשק תקשורת סדרתי (UART), SPI (ממשק היקפי סדרתי) ו- I2C (ממשק סידורי 2-חודים) לתקשורת עם מכשירים אחרים.
פרמטרים טכניים של Atmega16a-au
• יצרן: מיקרו -שבב
• חבילה / מקרה: TQFP-44
• אריזה: מגש
• רזולוציית ADC: 10 ביט
• גודל RAM של נתונים: 1 KB
• גודל ROM של נתונים: 512b
• רוחב אוטובוס נתונים: 8 סיביות
• מתח אספקה: 2.7V ~ 5.5V
• טמפרטורת הפעלה: -40 מעלות צלזיוס ~ 85 מעלות צלזיוס
• תדר שעון מקסימלי: 16 מגה הרץ
• גודל זיכרון התוכנית: 16 KB
• סגנון הרכבה: SMD/SMT
• מספר טיימרים/דלפקים: 3 טיימר
• קטגוריית מוצרים: בקרי מיקרו 8 סיביות - MCU
ניהול צריכת חשמל של Atmega16a-au
מקור השכמה: בקר מיקרו זה מספק מגוון אפשרויות מקור השכמה, כמו הפרעה חיצונית, הצפת טיימר וכן הלאה.כאשר מופעל מקור ההשכמה, המערכת יכולה להתעורר ממצב שינה ולהמשיך לבצע את התוכנית הרגילה, ובכך לחסוך צריכת חשמל.
מצב הספק נמוך היקפי: ציוד היקפי של AtmeGa16a-Au יכול להזין באופן סלקטיבי למצב ההספק הנמוך כדי להפחית את זרם המתנה.לדוגמה, אנו יכולים לכבות טיימרים לא נחוצים, ממשקי תקשורת סדרתיים או הפרעות חיצוניות כדי להפחית את צריכת החשמל של המערכת.
מצב שינה: ATMEGA16A-AU יכול להיכנס לסוגים שונים של מצבי שינה, כגון סרק, כוח-למטה והמתנה.במצבים אלה, המעבד ורוב ציוד היקפי מפסיקים לעבוד להפחתת צריכת החשמל.הבחירה במצבי השינה הללו תלויה בזמן הדרוש להתעוררות ובמדינה ישוחזרו לאחר התעוררות.
ניהול חשמל: AtmeGa16A-AU מספק פונקציות ניהול כוח להפחתת צריכת החשמל של המערכת כולה.פונקציות אלה מתאימות את המתח והתדירות של אספקת החשמל בהתאם לדרישות המערכת כדי לאזן את הסחר בין ביצועים לצריכת חשמל.
ניהול שעון: לבקר המיקרו יש מחלקת שעון הניתנת לתכנות המחלקת את תדר שעון ה- CPU לתדר הרצוי כדי להפחית את צריכת החשמל.זה שימושי ליישומים שאינם דורשים תדר שעון גבוה ויכולים להפחית ביעילות את צריכת חשמל המערכת.בנוסף, הוא תומך במקורות שעון מרובים, כולל מתנדי RC פנימיים ומתנודות קריסטל חיצוניות.מתנד הקריסטל החיצוני מספק אות שעון יציב ומדויק יותר ליישומים הדורשים שעון דיוק גבוה.
יישום ATMEGA16A-AU
ישנם יישומים רבים עבור בקר המיקרו ATMEGA16A-AU, כולל אך לא מוגבלים להלן:
• מקלדות
• iPad
• בד
• קינדל
• אזעקות אש
• טלוויזיות דיגיטליות
• כונני קלטת
• בקרת DDC
• מסופים גרפיים
• מכשירי בקרת תהליכים
חבילת ATMEGA16A-AU
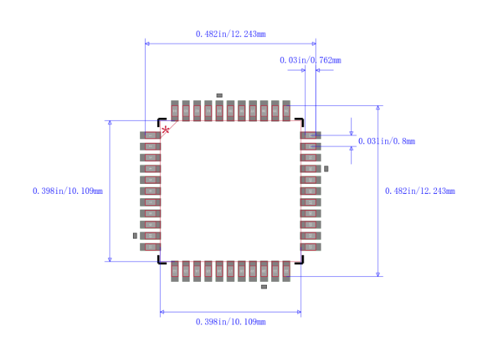
ATMEGA16A-AU מודד 10 מ"מ באורך, 10 מ"מ ברוחב וגובה 1 מ"מ, עם 44 סיכות.זה מגיע בחבילת TQFP-44 כמו גם באריזת מגש.להלן תרשים החבילה לעיון.
כיצד לבנות ולפתח מערכת משובצת המבוססת על Atmega16a-Au?
עיצוב חומרה: ראשית, עלינו לתכנן את ממשקי הקלט/הפלט הדרושים עבור מיקרו -בקר, כגון ממשק SPI, ממשק UART וממשק GPIO כדי לעמוד בדרישות היישום.בנוסף, עלינו לתכנן לוח מעגלים כדי לאכלס את בקר המיקרו ATMEGA16A-AU.לוח זה צריך להכיל את כל מעגלי אספקת החשמל והממשק הנדרשים על ידי בקר המיקרו, כמו מעגלי אספקת חשמל, מעגלי קריסטל ומעגלי איפוס.
הגדרת סביבת פיתוח תוכנה: על מנת לכתוב ולבצע באגים קוד, עלינו להתקין סביבת פיתוח תוכנה מתאימה.זה כולל בדרך כלל סביבת פיתוח משולבת (IDE), כמו אולפן ATME, ומהדרים ותואמים תואמים.עלינו להתקין את המנהלי ההתקנים המתאימים כך שהמחשב יוכל לזהות ולתקשר עם מיקרו -בקר.
כתיבת הקוד: בעזרת שפת התכנות שבחרת (בדרך כלל C או C ++), אנו יכולים להתחיל לכתוב את הקוד שישמש לשליטה על ATMEGA16A-AU.בתהליך הכתיבה עלינו לקרוא את גיליון הנתונים של AtmeGa16A-AU על מנת להבין וליישם את פונקציות ה- API או הספריה שהוא מספק.
קומפילציה ובאת ניפוי בקוד: באמצעות ה- IDE, אנו יכולים להרכיב את הקוד ליצירת קובץ בינארי שיכול לפעול ב- AtmeGa16a-Au.לאחר מכן, אנו יכולים להשתמש ב- Debugger כדי להעלות את הקובץ הבינארי למיקרו -בקר ולהפעיל את הקוד עליו.אם יש בעיה בריצה, אנו יכולים לאתר ולתקן את השגיאה בעזרת הבאגים.
בדיקה ואימות: ברגע שהקוד יכול לפעול בהצלחה על בקר המיקרו, עלינו לבצע סדרת בדיקות ומשימות אימות כדי להבטיח שהיא תעבוד כצפוי.בדיקות אלה עשויות לכלול בדיקות ביצועים, בדיקות פונקציונליות, בדיקות אמינות וכן הלאה.
שילוב מערכת: לבסוף, עלינו לשלב את המערכת המשובצת עם חומרה ותוכנה אחרים לבניית מערכת שלמה.זה עשוי להיות כרוך בחיבורי ממשק למכשירים כמו מפעילים, חיישנים, תצוגות וכו ', כמו גם לתקשורת עם יישומים ברמה העליונה.
שאלות נפוצות [שאלות נפוצות]
1. מה זה ATMEGA16?
Atmega16 הוא בקר מיקרו-ביצועים בעל ביצועים גבוהים של 8 סיביות ממשפחת מגה אבר של Atmel.ATMEGA16 הוא בקר מיקרו -בקר של 40 סיכות המבוסס על ארכיטקטורת RISC משופרת (מחשוב מערך הוראות) עם 131 הוראות חזקות.יש לו זיכרון פלאש הניתן לתכנות של 16 קילוגרמים, זיכרון RAM סטטי של 1 KB ו- EEPROM של 512 בתים.
2. באילו שפות תכנות ניתן להשתמש כדי לתכנת את ATMEGA16A-AU?
ניתן לתכנת את ATMEGA16A-AU באמצעות C, C ++ או בשפת הרכבה.
3. מה ההבדל בין ATMEGA16 ל- ATMEGA16A?
ATMEGA16 ו- ATMEGA16A נבדלים זה מזה בנקודה אחת.ה- ATMEGA16A החדש יותר יכול להתמודד עם מתח אספקה נמוך יותר של 1.8 וולט, ואילו המינימום עבור ATMEGA16 הוא 2.7 וולט.חוץ מזה, הם זהים באופן הגיוני.
4. אילו ממשקי תקשורת נתמכים על ידי ATMEGA16A-AU?
ה- ATMEGA16A-AU תומך במספר ממשקי תקשורת, כולל USART (משדר מקלטים סינכרוני ואסינכרוני אוניברסלי), SPI (ממשק היקפי סדרתי) ו- I2C (מעגל משולב בין משולב).