בקר מנוע צעד TB6600: Pinout, ממשק ארדואינו ואיך זה עובד
קָטָלוֹג
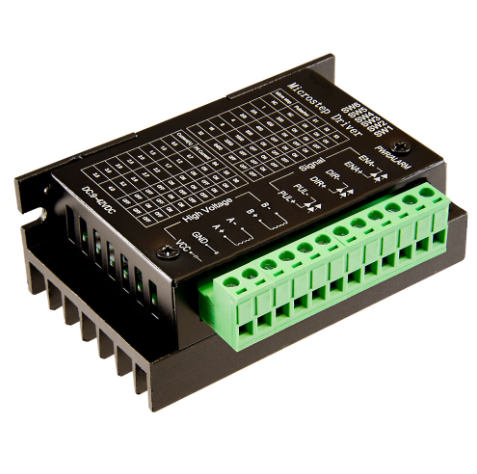
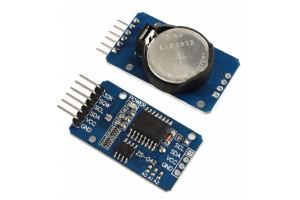
סקירה כללית של מודול נהג מנוע צעד TB6600
THE TB6600 מודול נהג מנוע צעד הוא מכשיר המובחן על ידי חוסנו ויכולת ההסתגלות שלו לבקרת מנועי צעד דו-פאזיים.זה מתחבר בצורה חלקה למגוון רחב של בקרי מיקרו, לרוב ארדואינו, ומטפח יצירת תפוקות דופק דיגיטליות מדויקות של 5V.תפוקות אלה דינאמיות לשמירה על האיזון העדין של השליטה במנוע.פועל בטווח מתח של 9-42V DC ותומך בזרם שיא של 4 אמפר, זו בחירה רב-תכליתית עבור פרויקטים שונים המונעים על ידי מנוע.יכולת הסתגלות זו מאפשרת לך לנהל ביעילות את מיקום המנוע והמהירות המוטורית, וזה מועיל מאוד ביישומים שמטרתם למזער את מורכבות הקידוד.בידוד האופטוקלר בתדירות הגבוהה של המודול משפר באופן משמעותי את אמינותו על ידי הפחתת סיכוני הפרעות והבטחת פעולה קבועה.
ההרמוניה עם בקרי מיקרו רבים הופכת את הנהג TB6600 לבחירה מתאימה לפרויקטים הדורשים שליטה מוטורית מורכבת.זה משתלב בצורה חלקה עם פלטפורמות כמו Arduino, ומשקף את יכולתו לעמוד בציפיות מגוונות.לדוגמה, שימוש במתקן זה במכונות CNC או במדפסות תלת מימד מאפשר תנועה מדויקת ומבוקרת, הממחישה את התועלת שלו בתחומים שונים.
מודול זה בולט בזכות תמיכתו הן במנועי צעד דו-פאזיים ו -4 פאזות, כמו גם בתצורות היברידיות.העיצוב הדו-קוטבי של גשר H הוא אינטגרלי לניהול יעיל של מתח וזרם, ומבטיח שהנהג מספק ביצועי שיא על פני היישומים שלו.בסביבות בהן מתעדפות דיוק ואמינות, כגון קווי ייצור אוטומטיים ורובוטיקה, תכונות אלה מוערכות מאוד.
תכונות
|
תכונה |
תֵאוּר |
|
סוג הנהג |
מנהל התקן DC דו קוטבי H-Bridge |
|
פלט אפשרויות נוכחיות |
8 סוגים (0.5A עד 3.5A), הניתנים לבחירה עד 4 אמפר |
|
מצבי חלוקת משנה |
מתחלק עד 32, ניתן לבחירה ב 6 מצבים |
|
אפשרויות שלב מיקרו |
8 סוגים (1, 2/a, 2/b, 4, 8, 16, 32) |
|
בידוד אות קלט |
הפרדה פוטואלקטרית במהירות גבוהה |
|
מִמְשָׁק |
ממשק דופק יחיד סטנדרטי מלא |
|
פונקציית החזקת לא מקוונת |
כֵּן |
|
התאמה סביבתית |
גוף סגור למחצה לסביבות קשות |
|
פונקציית נעילת חשמל |
חצי אוטומטי, חסכון באנרגיה |
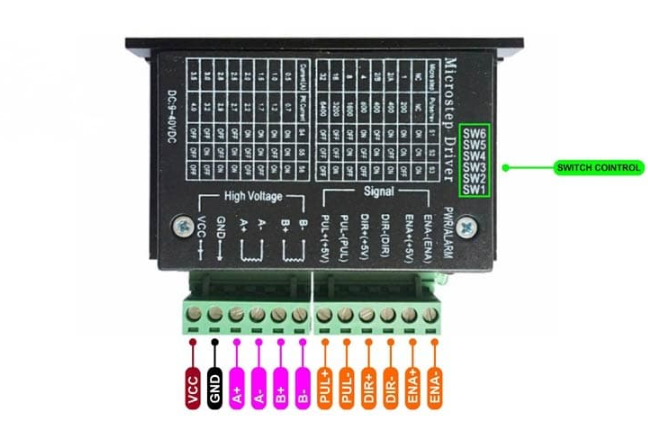
תצורת סיכה
מפרט טכני
|
מִפרָט |
פרטים |
|
מתח הפעלה |
9-40V DC |
|
זרם פלט |
0.7A-4.0A (ניתן לבחירה ב 8 שלבים באמצעות מתגי DIP) |
|
תדר דופק קלט |
עד 20kHz |
|
רמות אות קלט |
רמות אות 5V |
|
דופק למהפכה |
200-6400 |
|
זרם אות לוגיקה |
8A-15A |
|
תאימות מוטורית |
מתאים למנועי צעד דו-פאזיים ו -4 פאזות |
|
תכונות הגנה |
הגנה על זרם יתר, התחממות יתר |
|
בידוד קלט |
מבודד אופטי |
|
התנגדות לבידוד |
500 מגהמס |
|
מצב נתמך |
מצב PUL/FIR |
|
עֲלוּת |
עלות נמוכה |
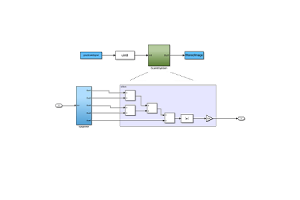
תצורת מעגל H-Bridge עבור TB6600
מודול הנהג TB6600 צעד מנוע הוא רכיב רציני שנועד לשלוט על מנועי צעד דו-פאזיים וגם 4 פאזות, תוך שימוש בתצורת גשר H-קוטבית להפעלה יעילה.תצורה זו מעסיקה טרנזיסטורים של MOSFET בכדי להבטיח ביצועים גבוהים מבחינת הטיפול הנוכחי ויציבות תרמית.המודול פועל על ידי אינטראקציה עם שני סיכות בקרה ראשוניות: סיכת המדרגה, המפעילה מנוע דריכה עם כל דופק, ואת סיכת הכיוון, שקובעת את כיוון הסיבוב של המנוע על בסיס המתח המופעל.יחד, תשומות אלה מאפשרות שליטה מדויקת על רצף ההדרכה של המנוע וכיוון הסיבוב.
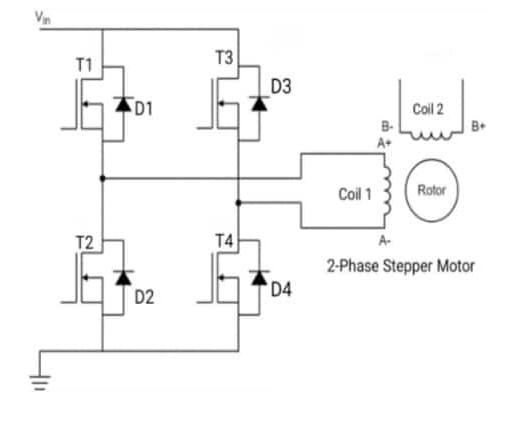
תרשים המעגל מדגיש ארבעה טרנזיסטורים מרכזיים, T1, T2, T3 ו- T4, המסודרים במבנה H-Bridge.MOSFETs אלה הם עמוד השדרה של פעולת המודול, ומאפשר זרימה דו כיוונית של הזרם הדרוש להנעת מנוע הצעד.בנוסף, התרשים כולל דיודות Flyback (D1, D2, D3 ו- D4), המהוות את המפתח להגנה על המעגל מפני דוקרני מתח הנגרמים על ידי העומס האינדוקטיבי של המנוע.דיודות אלה מונעות זרם יתר ונזק לרכיבים רגישים במהלך הפעולה.מסופי A+, A-, B+ו- B- משמשים לחיבור המנוע, ומבטיחים תנועה מדויקת ומבוקרת של פיר המנוע.
כיצד גשר ה- H מאפשר סיבוב מנוע?
מנהל ההתקן TB6600 פועל באמצעות הפעולה המתואמת של טרנזיסטורים MOSFET בגשר H.לְדוּגמָה:
• סיבוב בכיוון השעון מתרחש כאשר טרנזיסטורים T1 ו- T4 מופעלים, ומכוונים את זרימת הזרם מ- A+ ל- A-.
• סיבוב נגד כיוון השעון קורה כאשר T2 ו- T3 עוסקים, והופכים את הזרימה הנוכחית מ- A- ל- A+.
הפעלה לסירוגין זו של טרנזיסטורים מבטיחה תנועה דו כיוונית חלקה.כדי להשיג מומנט אופטימלי ותפעול יעיל, תזמון מדויק ויסות מתח הם חיוניים.
אופני פעולה לבקרה רב -תכליתית
ה- TB6600 תומך בארבעה מצבי הפעלה מובחנים, שכל אחד מהם נועד לאזן מומנט, דיוק וגודל שלב, תלוי בדרישות היישום:
• • מצב גל: במצב זה, רק סליל אחד מופעל בכל פעם.הפעלת סליל יחיד מסובבת את המנוע ב 90 מעלות בכיוון אחד תוך היפוך הזרם מסובב אותו בכיוון ההפוך.על ידי לסירוגין בין סלילים, המנוע משיג פעולה רציפה.מצב זה פשוט אך מספק פחות מומנט בהשוואה למצבים אחרים.
• • מצב שלב מלא: שני הסלילים מופעלים במקביל במצב זה, ומייצרים שדה מגנטי חזק יותר.התוצאה היא מומנט מוגבר, מה שהופך אותו לאידיאלי ליישומים הדורשים יותר כוח ויציבות.
• • מצב חצי שלב: שילוב של מצב גל ומצב שלב מלא, מצב זה מתחלף בין המניעה של סליל יחיד לשני הסלילים.זה למעשה מצמצם את גודל הצעד ל 45 מעלות, ומספק איזון בין דיוק למומנט.עם זאת, המומנט עשוי להשתנות תלוי אם סליל אחד או שניהם מופעלים במהלך צעד מסוים.
• • מצב מיקרוסטפ : המצב המדויק ביותר מבין כל המצבים, מצב מיקרוסטפיה מצמצם את גודל הצעד עוד יותר על ידי מווסת בזהירות את הזרם דרך שלבי המנוע.זה מושג באמצעות מעגלים מתקדמים ליצירת מעברים חלקים והדרגתיים בין שלבים.מצב זה אידיאלי ליישומים הדורשים דיוק גבוה ומומנט עקבי, כגון מכונות CNC או רובוטיקה.
שילוב TB6600 עם Arduino Uno
שליטה יעילה של מנועי צעד דורשת שילוב של חומרה אמינה ותוכנה מתוכנתת בקפידה.נהג מנוע צעד TB6600 בולט ככלי מצוין להפעלת מנועי צעד דו-פאזיים.הוא תומך במצבים תפעוליים מרובים, כגון גל, שלב מלא, חצי שלב ומיקרו-סטייה.תכונות ההגנה המובנות שלה-כולל אמצעי הגנה מפני מתח נמוך, זרם יתר וחימום יתר-הופכים אותה לבחירה איתנה לפרויקטים הדורשים דיוק ועמידות.
כדי להגדיר את ה- TB6600 עם Arduino Uno, אסוף את הרכיבים הבאים:
• Arduino uno R3
• נהג מנוע צעד TB6600 (גרסת 4A)
• מנוע צעד (עם דירוג מומלץ של 1.65 א)
• אספקת חשמל אמינה (למשל, סוללה או מקור חשמל DC מוסדר)
• חוטי מגשר
• Arduino IDE המותקן במחשב שלך
כדי לשלב את ה- TB6600 עם הארדואינו, עקוב אחר ההוראות המפורטות הללו
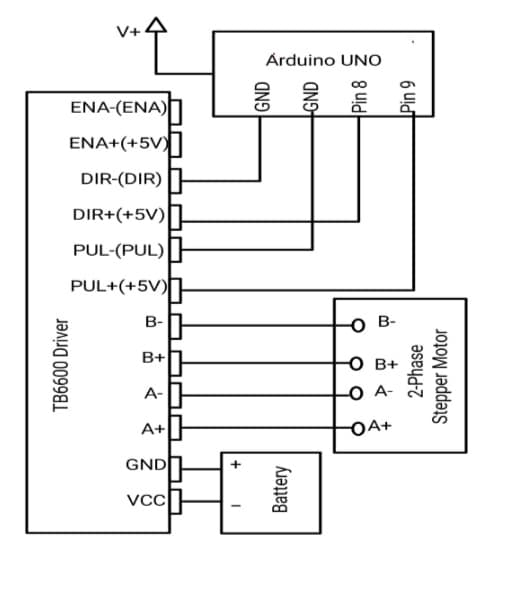
לחבר אותות כיוון ודופק
• קשר את מסופי ה- DIR+ ו- PUL+ ב- TB6600 עד סיכות ארדואינו 8 ו -9, בהתאמה.סיכות אלה שולחות אותות כיוון ודופק.
• חבר את מסופי ה- Dir-and Pul-Pul-to Fund (GND) של הארדואינו.
• חבר את המנוע ל- TB6600: חבר את חוטי מנוע הצעד למסופי TB6600.
• A+ ו- A- לסליל אחד של המנוע.
• B+ ו- B- לסליל האחר.
• הפעל את מנהל ההתקן TB6600: חבר את סיכות ה- VCC ו- GND ב- TB6600 לאספקת החשמל שלך.ודא שהמתח תואם את דרישות המנוע והנהג שלך כדי למנוע נזק.
התאמת רזולוציית המיקרוסטפ
ה- TB6600 מאפשר לך לכוונן את דיוק התנועה של מנוע הצעד באמצעות מתגי SW1 ו- SW2.התאם את המתגים הללו כדלקמן:
• ¼ רזולוציית שלב: הפעל את SW1 ו- SW2 כבוי.
• ⅛ רזולוציית שלב: הגדר SW1 כבוי ו- SW2.
• רזולוציית שלב 1/32: הגדר את SW1 וגם SW2 כבוי.
• מצב שלב מלא: הגדר גם SW1 וגם SW2.
טבלת האמת
|
SW2 |
רזולוציית מיקרוסטפ |
|
כבוי |
1/32 שלב |
|
עַל |
1/8 שלב |
|
כבוי |
1/4 שלב |
|
עַל |
צעד מלא |
התאמות מתג מאפשרות לך לייעל את האיזון בין דיוק למהירות בהתבסס על צרכי הפרויקט שלך.
כדי להבטיח שהמנוע שלך פועל בגבולות זרם בטוחים, TB6600 כולל מתגים נוספים (SW4 ו- SW6) להתאמת זרימת הזרם.הגדרות אלה מועילות ל:
• מניעת נזקי עומס יתר.
• שמירה על ביצועים מוטוריים עקביים.
• ודא תמיד כי זרם המנוע נשאר מתחת למקסימום של הנהג 4A כדי להגן על שני הרכיבים.
• כיוון מנוע שליטה: אם אתה רוצה שהמנוע יסתובב נגד כיוון השעון, שנה את מצב ה- DIR+ PIN בקוד Arduino שלך.
• בדיקה ופתרון בעיות: לאחר השלמת ההתקנה, העלה רישום בקרת מנוע צעד בסיסי כדי לאמת את החיווט והפונקציונליות של הנהג.
• הימנע מחימום יתר: להבטיח אוורור מתאים לנהג TB6600, במיוחד ביישומים שוטפים.
יישומים
מודול TB6600 ממלא תפקיד פעיל במגזרים רבים בהם משתמשים בשליטה מוטורית קפדנית.יכולת ההסתגלות שלה מאירה ביישומים שונים המדגישים את היכולות הייחודיות שלה:
מיקום אנטנה
בתחום התקשורת, השגת יישור אנטנה אופטימלי חובה לקבלת פנים ותמסורת איתות איכותיות.ה- TB6600 מקל על תנועת הדיוק, ובכך משפר את היעילות של מערכות תקשורת.
ניהול מנוע צעד
בתוך אוטומציה ורובוטיקה מושגת טיפול מנועי צעד מדויק באמצעות TB6600, ומאפשר לך לחדד את דיוק התנועה ואת אמינות המערכת בחיזוק.
פעולות CNC
עבור מכונות בקרה מספרית ממוחשבת (CNC), TB6600 משפר תהליכי חיתוך וטחינה מורכבים, ומאפשר לך לשמור על רמות גבוהות של דיוק ודיוק שניתן לחזור עליה בעבודתם.
דיוק הדפסת תלת מימד
בייצור תוספים, ובמיוחד הדפסת תלת מימד, TB6600 מציע בקרת מנוע מפורטת, התומך במיקום מדויק של ראשי הדפסה הנדרשים ליצירת צורות וצורות מורכבות.
בקרת מנוע מורכבת
המודול חשוב עבור משימות בקרה מוטוריות מורכבות במערכות אוטומציה מורכבות, שיפור היעילות ומאפשר ניהול מעודן.
שליטה על מהירות, מיקום וסיבוב
ה- TB6600 מצטיין בתרחישים הדורשים מהירות מדויקת ושליטה סיבובית, המשמשת לרוב למיטוב הביצועים בסביבות המשתנות ללא הרף.
מכשירי הדמיה ומערכות בנקאיות
המודול תומך בפעולה אמינה של מצלמות וכספומטים על ידי הבטחת תנועות מנוע חלקות ומדויקות, המרחיבות את תוחלת החיים התפעולית של המכשירים.
דיוק במכשירי חריטה
עבור כלי חריטה ומכונות, TB6600 מספק את השליטה המדויקת הדרושה לביצוע עיצובים מפורטים דק, גורם מסוכן בתעשיות בהן הדיוק והפרטים דומיננטיים.
עלינו
ALLELCO LIMITED
קרא עוד
חקירה מהירה
אנא שלח בירור, נגיב מייד.
שאלות נפוצות [FAQ]
1. באיזה אספקת חשמל עלי להשתמש בנהג TB6600?
נהג מנוע צעד TB6600 עובד עם מתח אספקת חשמל בין 8V ל- 45V.
2. כיצד אוכל לשלוט על מהירות מנוע הצעד עם TB6600?
ה- TB6600 משתמש במודולציה של רוחב הדופק (PWM) כדי להתאים את מהירות המנוע.אתה יכול לשנות את המהירות על ידי שינוי תדר PWM.
3. האם TB6600 יכול לתמוך במנועי צעד זרם גבוה?
כן, TB6600 יכול להתמודד עם עד 4.5A, מה שהופך אותו לתואם למנועי צעד המדורגים לזרם זה.
4. כיצד אוכל להפוך את כיוון המנוע באמצעות TB6600?
כדי להפוך את כיוון המנוע, העבר את רצף אות הקלט על סיכות הבקרה (למשל, IN1-In2-In3-In4 עבור קדימה, IN4-In3-In2-In1 להפך).
5. האם אוכל לחבר מנוע צעד עם יותר מ -4 חוטים ל- TB6600?
ה- TB6600 מיועד למנועי צעד 4 חוטים.אם למנוע שלך יש יותר מ -4 חוטים, תצטרך נהג אחר.
6. האם TB6600 תואם למנוע צעד NEMA23?
ה- TB6600 עובד היטב עם מנועי NEMA17 אך בדרך כלל אינו מתאים למנועי NEMA23 בגלל הדרישות הנוכחיות הגבוהות יותר שלהם.

מדריך שלם לחיישן IR מתכוונן E18-D80NK
ב- 2024/12/12
DS3231 מודול RTC הסביר: תרשים סיכה, מפרט וממשק מיקרו -בקר
ב- 2024/12/12
פוסטים פופולריים
-

מחשבים מערכי הוראות מורכבים: כיצד הם שינו מחשוב?
ב- 8000/04/18 147749
-

Pinout USB-C ותכונות
ב- 2000/04/18 111895
-
שימוש בפרימיטיביות סימולציה אחידות של Xilinx: מדריך מקיף לעיצוב וסימולציה של FPGA
ב- 1600/04/18 111349
-
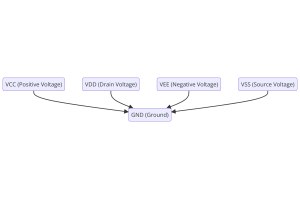
מתחי אספקת חשמל באלקטרוניקה: המשמעות של VCC, VDD, VEE, VSS ו-GND
ב- 0400/04/18 83713
-

מדריך מחברים RJ45: Pinout, חיווט, סוגי כבלים ושימושים
ב- 1970/01/1 79502
-
המדריך האולטימטיבי לקודי צבע חוט במערכות חשמל מודרניות
האופן בו מערכות החשמל שלנו משתמשות בצבעים אינן רק למראה.כל צבע חוט מציין כעת פונקציה ספציפית, מה שמקל על זיהוי וטיפול נכון ברכיבים חשמליים במהלך ההתקנה והתחזוקה.זה לא רק מזרז תהליכים תפעוליים אלא ג...ב- 1970/01/1 66866
-

גורם איכותי (ש) גורם: משוואות ויישומים
גורם האיכות, או 'Q', חשוב בבדיקת עד כמה משרנים ומהודדים עובדים במערכות אלקטרוניות המשתמשות בתדרי רדיו (RF).'Q' מודד עד כמה מעגל מצמצם את אובדן האנרגיה ומשפיע על טווח התדרים שהמערכת יכולה להתמודד עם...ב- 1970/01/1 63002
-

מדריך שסתומי טיהור: תפקוד, תסמינים, בדיקה והחלפה לביצועי מנוע מיטביים
שסתום הטיהור הוא חלק מרכזי במערכת המכונית המסייעת לשמור על נקייה של האוויר על ידי ניהול אדי דלק לפני שהם יכולים לברוח לאטמוספרה.זה לא רק מסייע לסביבה על ידי הפחתת הזיהום, אלא גם משפר את המכונית ומש...ב- 1970/01/1 62931
-
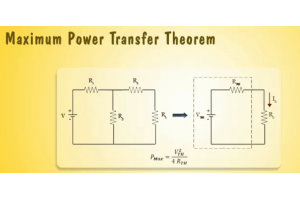
השגת ביצועי שיא עם משפט העברת הכוח המרבי
משפט העברת הכוח המרבי מסביר כיצד אנרגיה ממקור, כמו סוללה או גנרטור, זורמת לעומס מחובר.זה מראה את התנאי המדויק בו העומס מקבל הכי הרבה כוח.מאמר זה מכסה את המשמעות של משפט, כיצד הוא עובד במעגלי DC וגם...ב- 1970/01/1 54073
-

מפרטי סוללה A23 ותאימות
סוללת A23 היא סוללה קטנה בצורת צילינדר עם מתח גבוה.נקרא גם 23A, 23AE או MN21, הוא פועל ב 12 וולט וגבוה בהרבה מסוללות AA או AAA.העיצוב המיוחד שלו הופך אותו למושלם לגאדג'טים הזקוקים למקור כו...ב- 1970/01/1 52087
מספר חלק חם
-

MAX208ECNG+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 4/4 24DIP
ADP5022ACBZ-4-R7
Analog Devices Inc.
IC REG TRPL BCK/LNR SYNC 16WLCSP
DS1217A-64K-25
Analog Devices Inc./Maxim Integrated
MODULE NVRAM 8KB 250NS CARTRIDGE
AD5744RCSUZ
Analog Devices Inc.
IC DAC 14BIT V-OUT 32TQFP
TLC7528CNS
Texas Instruments
IC DAC 8BIT A-OUT 20SO
06035A910JAT2A
KYOCERA AVX
CAP CER 91PF 50V NP0 0603
FAN4800AUN
onsemi
IC PFC CTR AV CURR 268KHZ 16DIP
RR264MM-400TR
Rohm Semiconductor
DIODE GEN PURP 400V 1A PMDU
TMP106YZCT
Texas Instruments
SENSOR DIGITAL -40C-125C 6DSBGA
MCT06030C1002FP500
Electro-Films (EFI) / Vishay
RES SMD 10K OHM 1% 1/8W 0603
DMN6068LK3Q-13
Diodes Incorporated
MOSFET BVDSS: 41V 60V TO252
ADS7845E/2K5G4
Texas Instruments
IC SCREEN CNTRL 12BIT 16SSOP
XC4005E-3PQ100I
AMD
IC FPGA 77 I/O 100QFP
1812HC821KAT3A\SB
KYOCERA AVX
CAP CER 820PF 3KV X7R 1812
NRVTS12100PFST3G
onsemi
DIODE SCHOTTKY 100V 12A TO277-3
6N135-500E
Broadcom Limited
OPTOISO 3.75KV TRANS W/BASE 8SMD
MAX333AEUP+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 4 45OHM 20TSSOP
LFB212G45CG1C187
Murata Electronics
RF-D -

SC1565IST18TRT
Semtech Corporation
IC REG LINEAR 1.8V 1.5A SOT223-3
AD5220BN10
Analog Devices Inc.
IC POT DGTL 10K 128POS 8-DIP
LM2904AVQPWRG4
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8TSSOP
BTF3125EJXUMA1
Infineon Technologies
IC PWR SWITCH N-CHAN 1:1 TDSO-8
744773115
Würth Elektronik
FIXED IND 15UH 1.2A 235 MOHM SMD
LP2981AIM5X-2.9
Texas Instruments
IC REG LINEAR FIXED LDO REG
1808SC102MAJ1A
KYOCERA AVX
CAP CER 1000PF 1.5KV X7R 1808
DS89C420-MNL
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT 16KB FLASH 40DIP
STP16DPS05MTR
STMicroelectronics
IC LED DRIVER LINEAR 100MA 24SO
VC060305A150DP
KYOCERA AVX
VARISTOR 8.5V 30A 0603
CSD16410Q5A
Texas Instruments
MOSFET N-CH 25V 16A/59A 8VSON
HAL1000UT-K
TDK-Micronas GmbH
MAGNETIC SWITCH PROG TO92UT
SI1403BDL-T1-GE3
Vishay Siliconix
MOSFET P-CH 20V 1.5A SC70-6
AD7999YRJZ-1500RL7
Analog Devices Inc.
IC ADC 8BIT SAR SOT23-8
EP2A15B724C7
Intel
IC FPGA 492 I/O 724BGA
SN74AHC138RGYR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16VQFN
PIC16F627A-I/SS
Microchip Technology
IC MCU 8BIT 1.75KB FLASH 20SSOP
MAX98307ETE+T
Analog Devices Inc./Maxim Integrated
IC AMP CLASS DG MONO 3.3W 16TQFN -

AOB290L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 100V 18A/140A TO263
MAX13433EETD+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 1/1 14TDFN
SN74LVC112ADR
Texas Instruments
IC FF JK TYPE DUAL 1BIT 16SOIC
ATSAM4SD32BA-MU
Microchip Technology
IC MCU 32BIT 2MB FLASH 64QFN
CL31A106KPHNNNF
Samsung Electro-Mechanics
CAP CER 10UF 10V X5R 1206
SOLC-120-02-F-Q-A
Samtec Inc.
CONN RCPT 80POS 0.05 GOLD SMD
UPW1J101MPD
Nichicon
CAP ALUM 100UF 20% 63V RADIAL
CS5532-BSZR
Cirrus Logic Inc.
IC ADC 24BIT SIGMA-DELTA 20SSOP
CC0603GRNPO9BN120
YAGEO
CAP CER 12PF 50V C0G/NPO 0603
S-812C50AMC-C3ET2G
ABLIC Inc.
IC REG LINEAR 5V 75MA SOT23-5
C3216X8R1H684M160AE
TDK Corporation
CAP CER 0.68UF 50V X8R 1206
CY2309NZSC-1HT
Cypress Semiconductor Corp
IC CLK BUF 1:9 133.3MHZ 16SOIC
FDD6632
Fairchild Semiconductor
MOSFET N-CH 30V 9A DPAK
GCM155R71E473KA55D
Murata Electronics
CAP CER 0.047UF 25V X7R 0402
LM2743MTCX
Texas Instruments
IC REG CTRLR BUCK 14TSSOP
7440650047
Würth Elektronik
FIXED IND 4.7UH 4.6A 23 MOHM SMD
SS2P4HM3/84A
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 40V 2A DO220AA
V24C12H100BS
Vicor Corporation
DC DC CONVERTER 12V 100W